六軸協(xié)作機(jī)器人作為當(dāng)前工業(yè)自動(dòng)化領(lǐng)域的重要設(shè)備,憑借其靈活性和安全性在制造業(yè)中獲得了廣泛應(yīng)用。六軸機(jī)器人采用六個(gè)旋轉(zhuǎn)關(guān)節(jié)的機(jī)械結(jié)構(gòu)設(shè)計(jì),能夠在三維空間內(nèi)實(shí)現(xiàn)接近人類手臂的自由度運(yùn)動(dòng)。與傳統(tǒng)工業(yè)機(jī)器人不同,六軸協(xié)作機(jī)器人特別強(qiáng)調(diào)人機(jī)協(xié)作的安全性,集成了力控制、碰撞檢測(cè)等先進(jìn)功能。今天和越疆六軸協(xié)作機(jī)器人廠家一起從多方面了解一下六軸協(xié)作機(jī)器人工作原理吧。
一、機(jī)械結(jié)構(gòu)組成
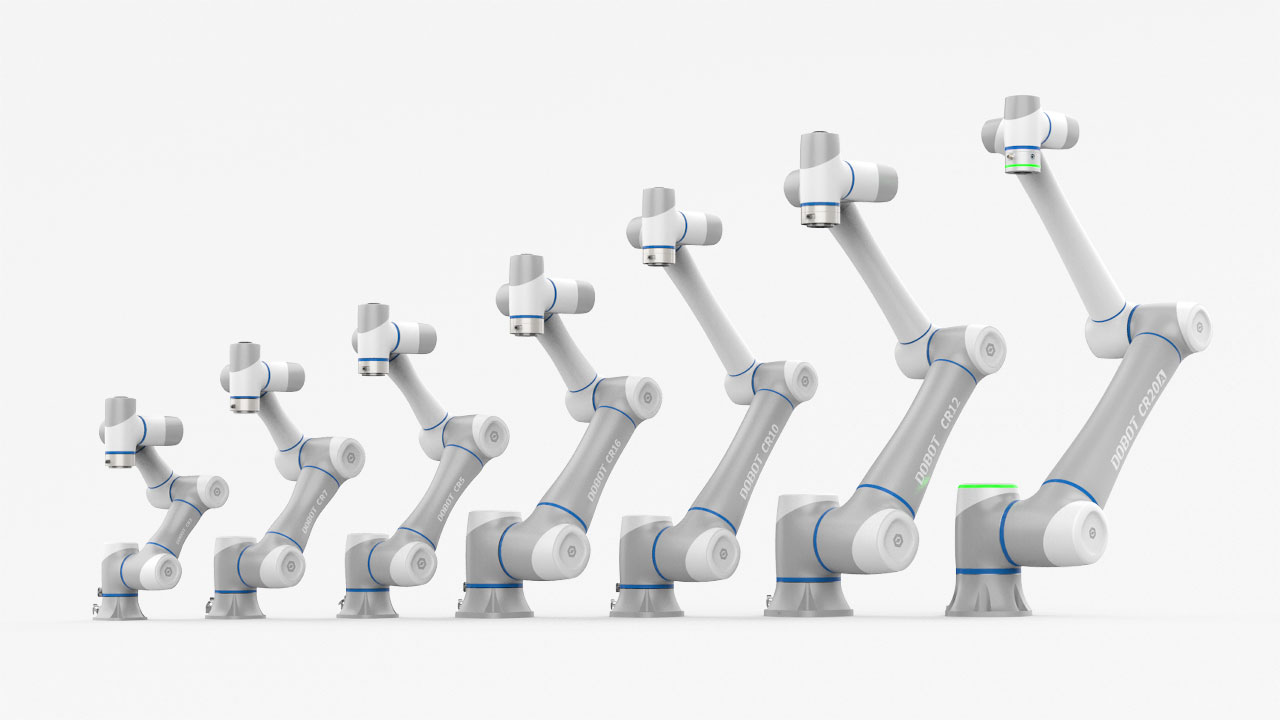
六軸協(xié)作機(jī)器人的機(jī)械結(jié)構(gòu)是其實(shí)現(xiàn)復(fù)雜運(yùn)動(dòng)的基礎(chǔ),主要包括以下核心部件:
1、基座:機(jī)器人的固定部分,提供穩(wěn)定支撐
2、六個(gè)旋轉(zhuǎn)關(guān)節(jié):每個(gè)關(guān)節(jié)配備伺服電機(jī)和減速器
3、連桿:連接各關(guān)節(jié)的機(jī)械臂部分
4、末端執(zhí)行器接口:用于安裝各種工具和夾具
5、電纜管理系統(tǒng):確保線路整潔且不影響運(yùn)動(dòng)
這種結(jié)構(gòu)設(shè)計(jì)使六軸協(xié)作機(jī)器人能夠在工作空間內(nèi)實(shí)現(xiàn)幾乎任意角度和位置的精確到達(dá),滿足復(fù)雜作業(yè)需求。

二、運(yùn)動(dòng)控制系統(tǒng)
六軸協(xié)作機(jī)器人的運(yùn)動(dòng)控制系統(tǒng)是其智能化的核心,主要包含:
伺服驅(qū)動(dòng)系統(tǒng):精確控制每個(gè)關(guān)節(jié)電機(jī)的運(yùn)動(dòng)
運(yùn)動(dòng)控制器:計(jì)算各關(guān)節(jié)的運(yùn)動(dòng)軌跡和參數(shù)
編碼器反饋:實(shí)時(shí)監(jiān)測(cè)關(guān)節(jié)位置和速度
力/力矩傳感器:檢測(cè)外部作用力,實(shí)現(xiàn)柔順控制
控制系統(tǒng)通過(guò)逆運(yùn)動(dòng)學(xué)算法,將末端執(zhí)行器的目標(biāo)位置轉(zhuǎn)換為六個(gè)關(guān)節(jié)的角度指令,實(shí)現(xiàn)精準(zhǔn)定位。同時(shí),先進(jìn)的運(yùn)動(dòng)規(guī)劃算法確保運(yùn)動(dòng)過(guò)程平滑、高效。
三、安全協(xié)作機(jī)制
六軸協(xié)作機(jī)器人的安全系統(tǒng)是其區(qū)別于傳統(tǒng)工業(yè)機(jī)器人的關(guān)鍵特點(diǎn):
1、功率和力限制:通過(guò)力矩控制確保碰撞時(shí)的安全性
2、碰撞檢測(cè):實(shí)時(shí)監(jiān)測(cè)異常接觸并立即響應(yīng)
3、速度監(jiān)控:根據(jù)人機(jī)距離自動(dòng)調(diào)整運(yùn)行速度
4、安全認(rèn)證:符合ISO/TS15066等國(guó)際標(biāo)準(zhǔn)
這些安全機(jī)制使六軸協(xié)作機(jī)器人能夠在無(wú)物理隔離的情況下與人類共同工作,大大提高了生產(chǎn)線的靈活性。
四、傳感與感知系統(tǒng)
現(xiàn)代六軸協(xié)作機(jī)器人配備先進(jìn)的傳感系統(tǒng):
力/力矩傳感器:實(shí)現(xiàn)精確的力控制和柔順操作
3D視覺(jué)系統(tǒng):用于物體識(shí)別和定位
環(huán)境感知傳感器:檢測(cè)周圍障礙物和人員位置
溫度監(jiān)測(cè):防止電機(jī)和驅(qū)動(dòng)器過(guò)熱
這些傳感器數(shù)據(jù)通過(guò)高速總線傳輸至控制系統(tǒng),為智能決策提供實(shí)時(shí)依據(jù)。
五、通信與集成接口
六軸協(xié)作機(jī)器人提供豐富的通信接口:
工業(yè)以太網(wǎng):支持EtherCAT、PROFINET等協(xié)議
現(xiàn)場(chǎng)總線:兼容DeviceNet、CANopen等標(biāo)準(zhǔn)
數(shù)字I/O:用于簡(jiǎn)單設(shè)備連接和控制
軟件開(kāi)發(fā)接口:支持ROS、Python等編程環(huán)境
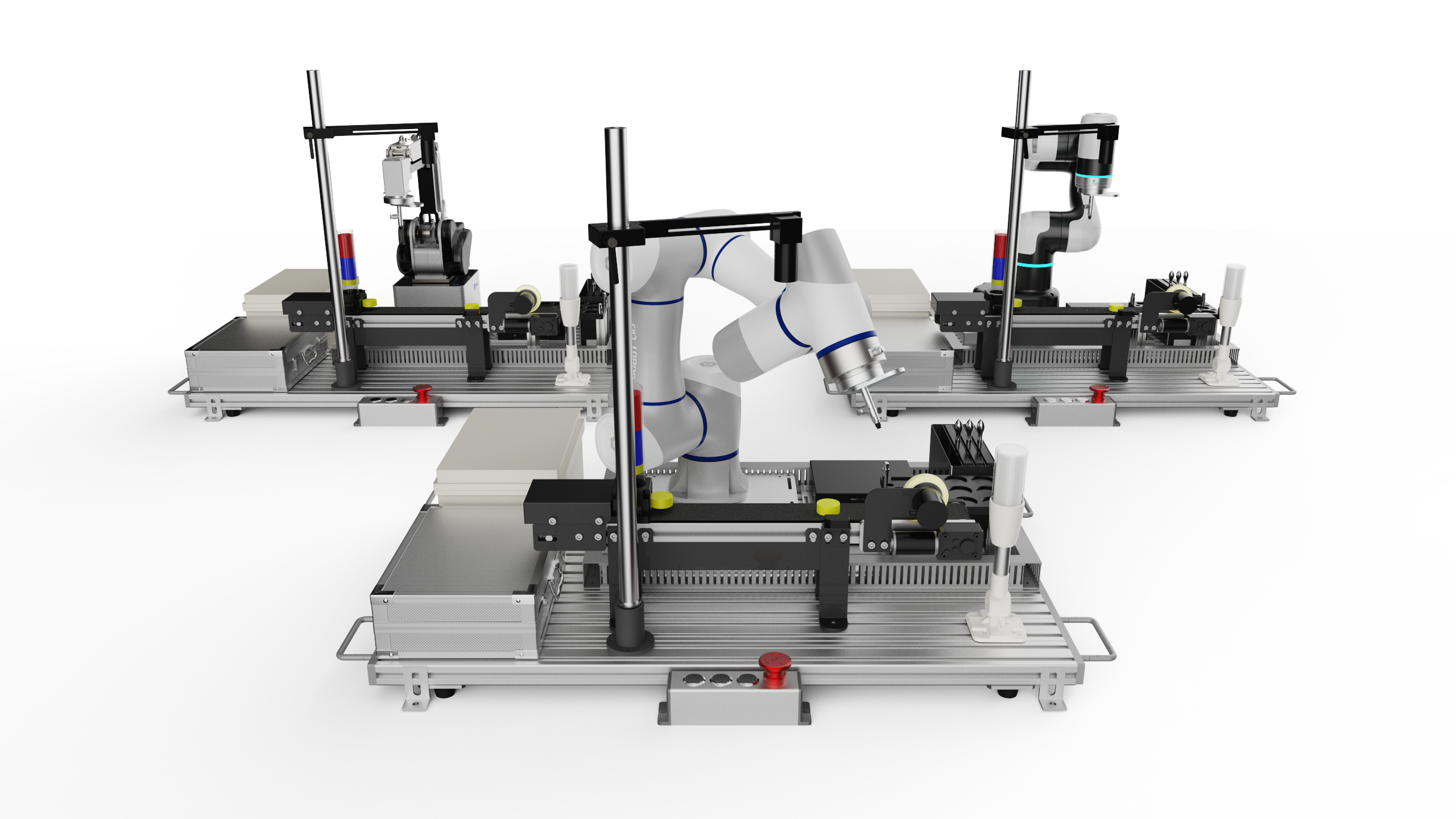
這些接口使六軸協(xié)作機(jī)器人能夠輕松集成到現(xiàn)有自動(dòng)化系統(tǒng)中,實(shí)現(xiàn)設(shè)備間的數(shù)據(jù)交換和協(xié)同工作。
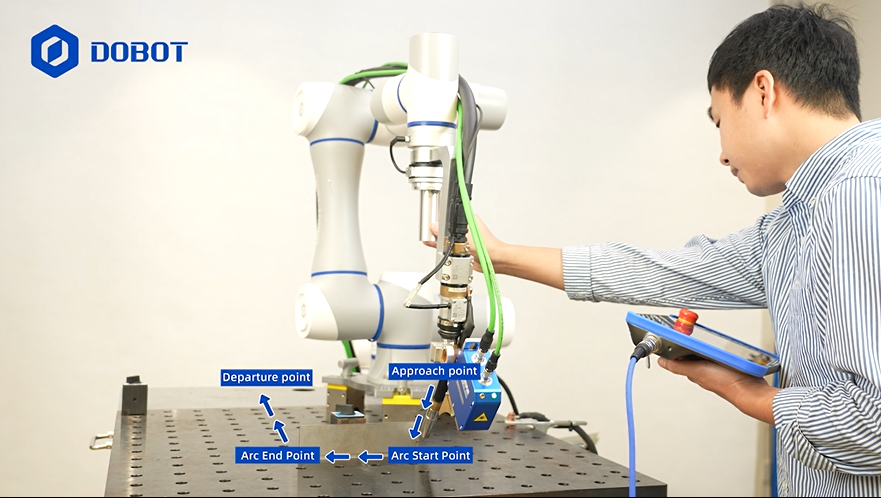
六、典型工作流程
六軸協(xié)作機(jī)器人的工作流程通常包括以下步驟:
1、任務(wù)規(guī)劃:確定工作目標(biāo)和運(yùn)動(dòng)路徑
2、軌跡計(jì)算:通過(guò)運(yùn)動(dòng)學(xué)算法生成關(guān)節(jié)運(yùn)動(dòng)指令
3、運(yùn)動(dòng)執(zhí)行:各關(guān)節(jié)伺服系統(tǒng)協(xié)同工作
4、實(shí)時(shí)調(diào)整:根據(jù)傳感器反饋優(yōu)化運(yùn)動(dòng)參數(shù)
5、任務(wù)完成:返回待機(jī)位置或準(zhǔn)備下一任務(wù)
整個(gè)過(guò)程由高性能控制器實(shí)時(shí)監(jiān)控和調(diào)整,確保運(yùn)動(dòng)精確性和安全性。




 汽車制造
汽車制造
 3C電子
3C電子
 金屬加工
金屬加工
 新零售
新零售
 食品飲料
食品飲料
 化工
化工
 艾灸理療
艾灸理療
 醫(yī)療手術(shù)
醫(yī)療手術(shù)
 半導(dǎo)體
半導(dǎo)體
 科研
科研
 教育
教育
 自動(dòng)化焊接
自動(dòng)化焊接
 碼垛
碼垛
 上下料
上下料
 無(wú)序分揀
無(wú)序分揀
.svg) 點(diǎn)涂膠
點(diǎn)涂膠
 視覺(jué)檢測(cè)
視覺(jué)檢測(cè)
 裝配
裝配
 搬運(yùn)
搬運(yùn)
 PCB 插件
PCB 插件
 打磨拋光
打磨拋光
 螺絲鎖付
螺絲鎖付